



2 առանցքային քայլային շարժիչ R60X2


Արտադրանքի ներկայացում



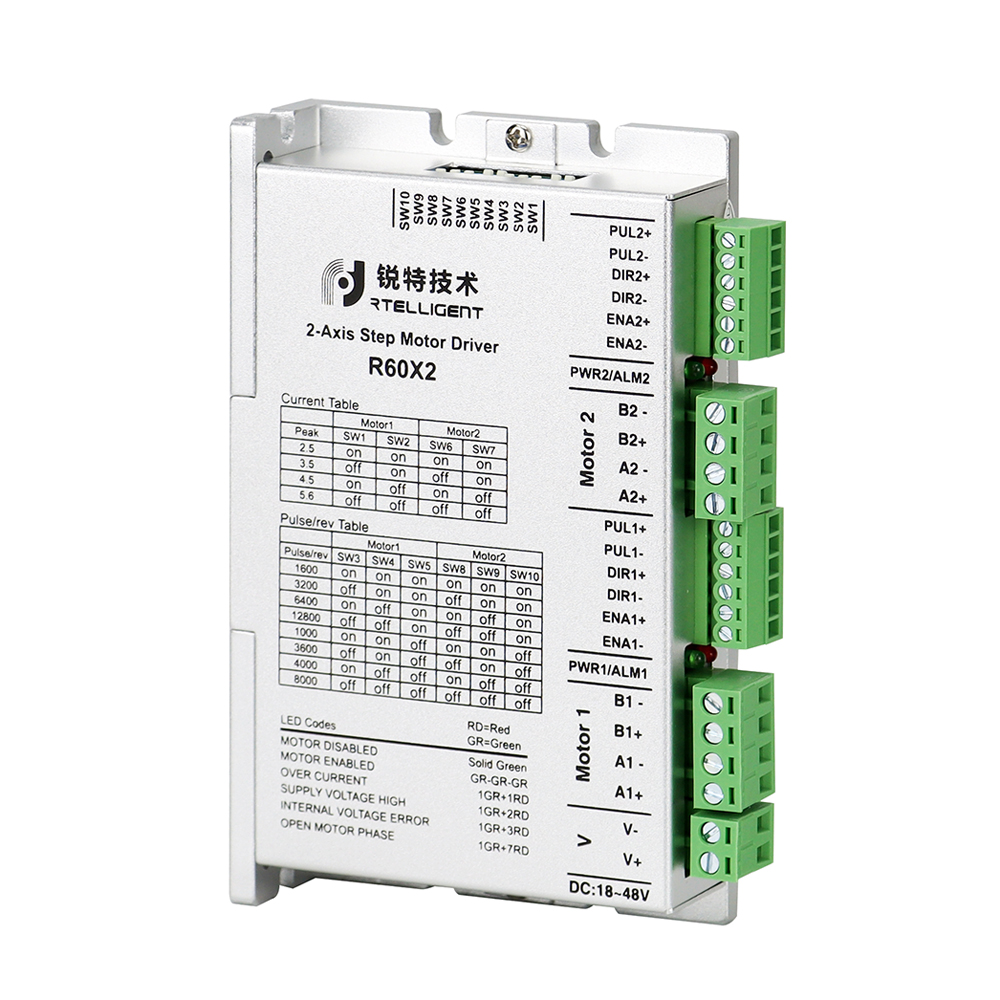
Կապ

Հատկանիշներ
| Էլեկտրամատակարարում | 24 - 48 Վ հաստատուն հոսանք |
| Ելքային հոսանք | Մինչև 5.6 ամպեր (գագաթնակետային) |
| Ընթացիկ կառավարում | PID հոսանքի կառավարման ալգորիթմ |
| Սեգմենտի կարգավորումներ | DIP անջատիչի կարգավորում, 8 տարբերակ |
| Արագության միջակայք | Օգտագործեք համապատասխան քայլային շարժիչ, մինչև 3000 պտույտ/րոպե |
| Ռեզոնանսի ճնշում | Ավտոմատ կերպով հաշվարկել ռեզոնանսային կետը և արգելակել IF թրթռումը |
| Պարամետրերի հարմարեցում | Ավտոմատ կերպով հայտնաբերում է շարժիչի պարամետրը, երբ վարորդը նախնականացվում է, օպտիմալացնում է կառավարման աշխատանքը |
| Իմպուլսային ռեժիմ | Աջակցության իմպուլս + ուղղություն, կրկնակի իմպուլս |
| Իմպուլսային ֆիլտրացում | 2 ՄՀց թվային ազդանշանի ֆիլտր |
| Պարապ հոսանք | Ավտոմատ կերպով կիսով չափ կրճատել հոսանքը շարժիչի կանգառից հետո |
Ընթացիկ կարգավորում
| AXIS-1 | AXIS-2 |
| |||
| Առավելագույն հոսանք | SW1 | SW2 | SW6 | SW7 | Նշում |
| 2.5Ա | on | on | on | on | Այլ ընթացիկ արժեքները կարող են հարմարեցվել |
| 3.5Ա | անջատված | on | անջատված | on | |
| 4.5Ա | on | անջատված | on | անջատված | |
| 5.6Ա | անջատված | անջատված | անջատված | անջատված | |
Միկրո-քայլերի կարգավորում
| AXIS-1 | AXIS-2 |
| ||||||
| Քայլեր/հեղափոխություն | SW3 | SW4 | SW5 | SW8 | SW9 | SW10 | Նշում | |
| 1600 | on | on | on | on | on | on | Այլ ընթացիկ արժեքները կարող են հարմարեցվել | |
| 3200 | անջատված | on | on | անջատված | on | on | ||
| 6400 | on | անջատված | on | on | անջատված | on | ||
| 12800 | անջատված | անջատված | on | անջատված | անջատված | on | ||
| 1000 | on | on | անջատված | on | on | անջատված | ||
| 3600 | անջատված | on | անջատված | անջատված | on | անջատված | ||
| 4000 | on | անջատված | անջատված | on | անջատված | անջատված | ||
| 8000 | անջատված | անջատված | անջատված | անջատված | անջատված | անջատված | ||
-
 Rtelligent R60X2 օգտագործողի ձեռնարկ
Rtelligent R60X2 օգտագործողի ձեռնարկ





