
Լոգիստիկա
Լոգիստիկ սարքավորումները լոգիստիկ համակարգի նյութական հիմքն են։ Լոգիստիկ տեխնոլոգիաների զարգացման և առաջընթացի հետ մեկտեղ, լոգիստիկ սարքավորումները անընդհատ կատարելագործվել և զարգացել են։ Այսօր լոգիստիկ սարքավորումների ոլորտում ի հայտ են գալիս բազմաթիվ նոր սարքավորումներ, ինչպիսիք են ավտոմատ եռաչափ պահեստները, բազմահարկ շաթլերը, չորս ուղղությամբ բեռնատարները, բարձրացված բեռնատարները, ավտոմատ տեսակավորիչները, փոխակրիչները, ավտոմատ կառավարվող մեքենաները (AGV) և այլն։ Մարդկանց աշխատուժը բարելավել է լոգիստիկ գործողությունների արդյունավետությունը և ծառայությունների որակը, կրճատել լոգիստիկ ծախսերը և նպաստել լոգիստիկ արդյունաբերության արագ զարգացմանը։

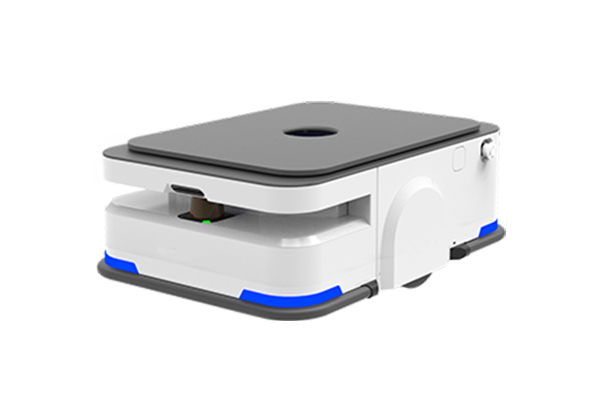
AGV ☞
Գործարանային ավտոմատացման, համակարգչային ինտեգրված արտադրական համակարգերի տեխնոլոգիայի աստիճանական զարգացման, ինչպես նաև ճկուն արտադրական համակարգերի և ավտոմատացված եռաչափ պահեստների լայն կիրառման հետ մեկտեղ, AGV-ն, որպես ավտոմատ մշակման և բեռնաթափման անհրաժեշտ միջոց՝ դիսկրետ լոգիստիկ կառավարման համակարգերը միացնելու և կարգավորելու համար՝ գործողությունները շարունակական դարձնելու համար, ունի կիրառման լայն շրջանակ, և տեխնիկական մակարդակը արագ զարգացել է։
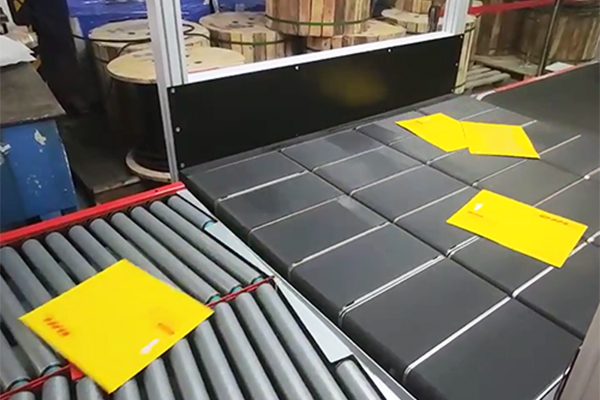
Միակ կտորի բաժանում ☞
Ավելի արդյունավետ և ավտոմատացված ծանրոցների բաժանման գործողությունները խթանելու համար, ժամանակի պահանջներին համապատասխան ի հայտ են եկել ծանրոցների մեկ կտորից բաղկացած բաժանման սարքավորումներ: Փաթեթների մեկ կտորից բաղկացած բաժանման սարքավորումները օգտագործում են տեսախցիկ՝ յուրաքանչյուր ծանրոցի դիրքը, ուրվագիծը և առջևի և հետևի կպչունության վիճակը ստանալու համար: Այս տեղեկատվության կապի ճանաչման ալգորիթմային ծրագրաշարի միջոցով կառավարվում են տարբեր գոտիային մատրիցային խմբերի սերվոշարժիչների աշխատանքային արագությունը, և ծանրոցների ավտոմատ բաժանումն իրականացվում է արագությունների տարբերության միջոցով: Փաթեթների խառը կույտերը դասավորվում են մեկ կտորի մեջ և անցնում են դրանց միջով կարգավորված ձևով:

Ռոտացիոն ավտոմատ տեսակավորման համակարգ ☞
Ինչպես անունն է հուշում, պտտվող ավտոմատ տեսակավորման համակարգը հիմնական տեսակավորման կառուցվածքն է «հավասարակշռության անիվի մատրից», անցքի դիրքը համապատասխանում է «հավասարակշռության անիվի մատրիցին», փաթեթը տեղափոխվում է գլխավոր փոխակրիչի վրա, և նպատակային անցքին հասնելուց հետո ճոճանակը կառավարվում է սերվոշարժիչով: Անիվի ղեկը կարող է փոխել փաթեթի ուղղությունը՝ տեսակավորման նպատակին հասնելու համար: Դրա հիմնական առավելությունն այն է, որ փաթեթների քաշի և ծավալի վրա ավելի քիչ սահմանափակումներ կան, և այն հարմար է մեծ փաթեթներ ունեցող կետերի համար, կամ կարող է համագործակցել խաչաձև գոտիով տեսակավորման համակարգի հետ՝ մեծ փաթեթների տեսակավորումը կամ փաթեթների առաքման գործողությունը փաթեթի հավաքագրումից հետո ավարտելու համար: